 |
Imagine a social or an industrial facility of the future where a team of robots have been deployed in order to provide services and accomplish everyday tasks such as
object handling
transportation
or pickup and delivery operations.
In such a context, different robots with different actuation, manipulation and perception capabilities must be coordinated in order to achieve various complex tasks that require collaborative actions with each other and with human operators. Thus, the effective and efficient supervision and coordination of the overall heterogeneous system mandates a decentralized framework that integrates
high-level task-planning
low-level motion planning and control
and robust, real-time sensing of the robots’ dynamic environment.
|
|
The World Robotics Survey1 points out that “…service robots for professional use boom…”, with indoor logistics being a major market. Sales of professional service robots in the logistics segment registered a growth of 28% in 2014 with the value of sales increasing to USD 2.2 billion. This shows the huge opportunity for European companies to address this area and satisfy the market demand. Emerging markets for indoor logistics robotics are offices, hotels and hospitals, where a close interaction between the robots and humans is required. For example, studies have given ground to the estimate that “logistics-related activities account for over 40 percent of a hospital's spending” and that medical staff spends up to 20% of their time on transportation tasks. Automating these tasks leads to great opportunities for cost savings.
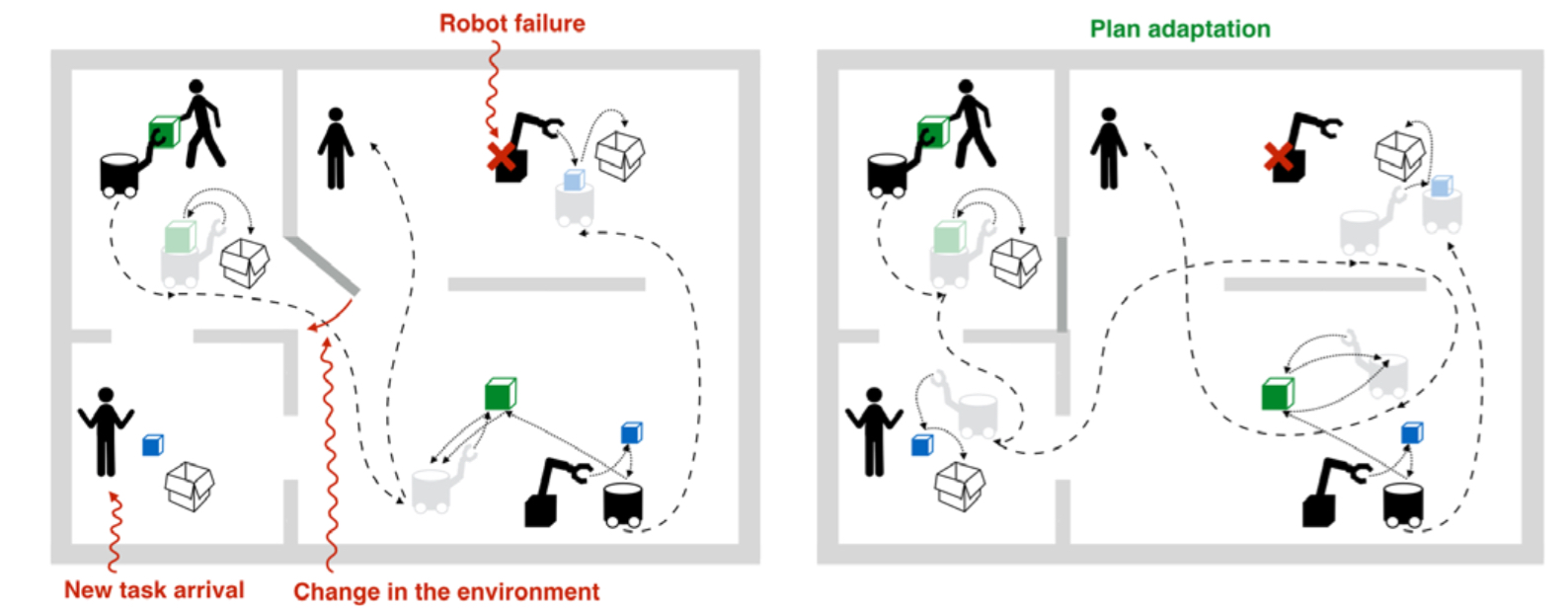
Current practice in coordination of robotic teams is at a great deal based on offline, centralized planning, leaving only a little room for real- time and coordinated decentralized actions. This restricts the operational efficiency of the multi- robot system in crowded and dynamic environments, since in most cases, sudden changes in the environment, the type of assigned tasks, and the need for coordination, would cause the system to halt, ask for a human intervention and restart. Therefore, despite the fact that public facilities are in some degree pre-structured, the introduction of a decentralized, real-time, automated task (re)-planning framework for semi-autonomous systems
will pave the way to an improved use of resources and a faster accomplishment of tasks inside public facilities and workspaces with high social activity;
will contribute towards the vision of more flexible multi-robot applications in both professional or domestic environments.
Based on the above ascertainments, the Co4Robots proposal is motivated by:
The need for a general and systematic framework that tackles the above problems in a real-time, decentralized and automated manner, while taking into account the possible interactions between the different agents.
The consideration that collaborative tasks should be realized among strongly heterogeneous agents, including humans, stationary manipulators, and mobile robotic platforms, and introduce several types of interactions which all need to be tackled in a common framework.
 |
Within co4robots, a team of heterogeneous robots needs to be coordinated when different tasks are assigned in a distributed, dynamic and non-predefined fashion. Based on these requirements, our goal is to build
a systematic real-time decentralized methodology to accomplish complex mission specifications given to a team of potentially heterogeneous robots,
a set of control schemes appropriate for the mobility and manipulation capabilities of the considered robotic platforms, their types and dynamics, the unexpected and sudden changes in the environment, as well as the presence of humans,
a set of perceptual capabilities that enable robots to localize themselves and estimate the state of their highly dynamic environment, in the presence of strong interactions and in a collaborative manner, and
their corresponding systematic integration at both the conceptual and the software implementation levels.
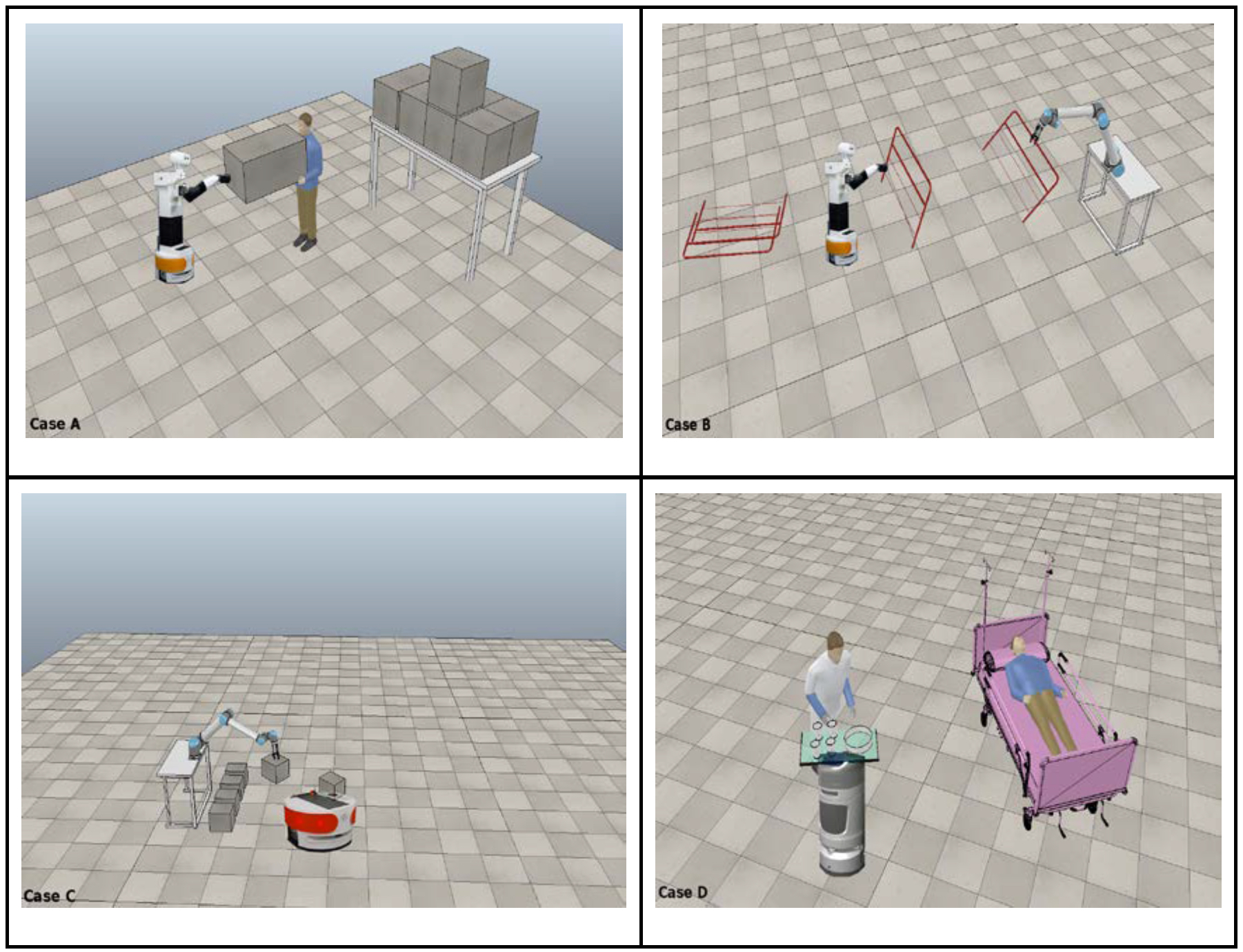
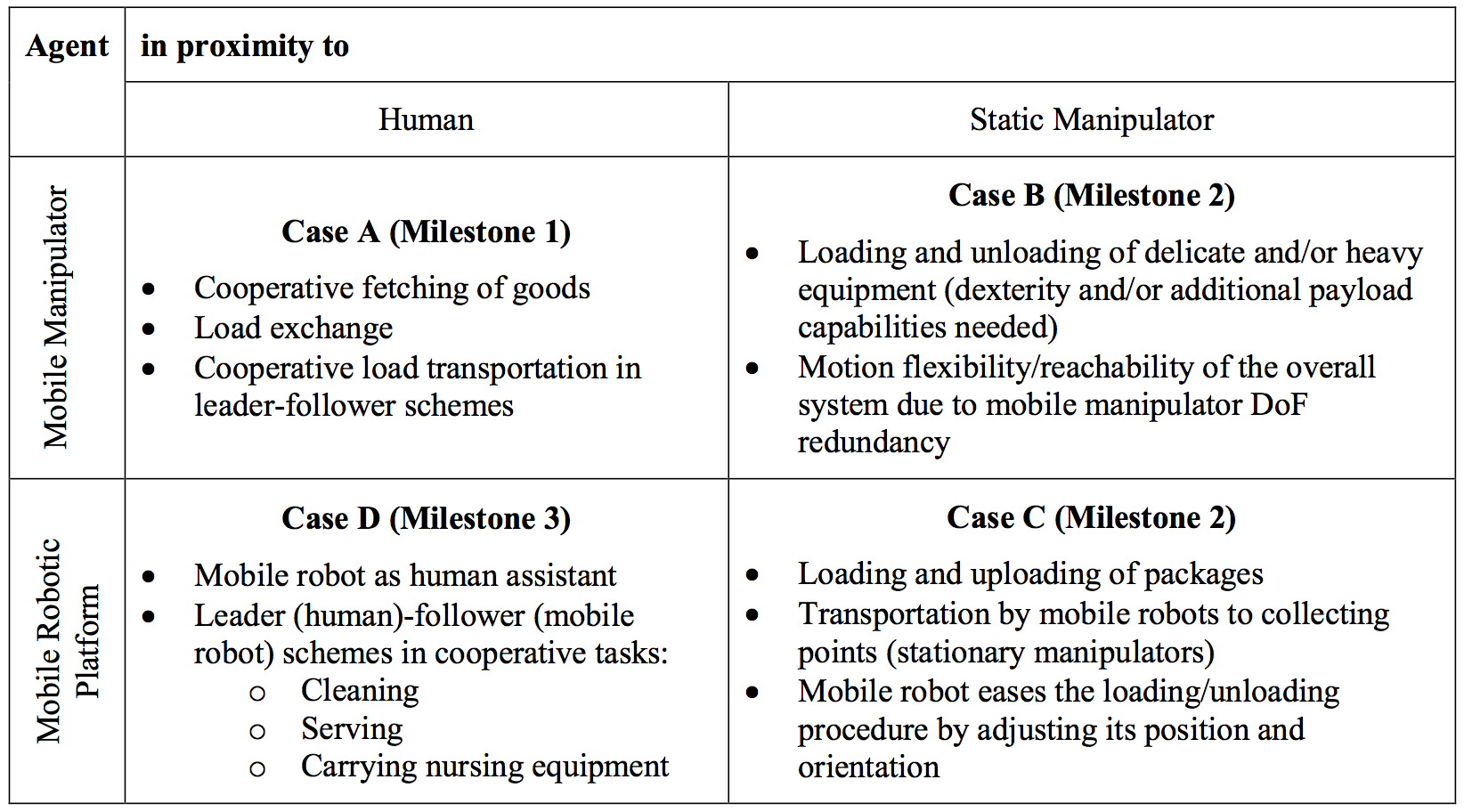
The proposed framework builds upon various cases of base interactions between heterogeneous agent pairs, with the prototype inter-agent interactions consisting of
physical guidance by a human for the transportation of an object carried by a robot (A),
collaborative grasping and manipulation of an object by two agents (B),
collaborating mobile platform and stationary manipulator to facilitate loading and unloading tasks onto the mobile platform (C), and
information exchange between a human giving orders and a robotic agent (D).
 |
 |
 |
This project has received funding from the European Union's Horizon 2020 research and innovation programme under grant agreement No 731869. |